# network interfaces
#/etc/network/interfaces
auto lo
iface lo inet loopback
iface eno1 inet static
auto vmbr0
iface vmbr0 inet static
#adresse publique
address xxx.xxx.xxx.xxx
gateway xxx.xxx.xxx.254
broadcast xxx.xxx.xxx.255
netmask 255.255.255.0
bridge-ports eno1
bridge-stp off
bridge-fd 0
auto vmbr1
iface vmbr1 inet static
address 192.168.2.254
netmask 255.255.255.0
bridge_ports none
bridge_stp off
bridge_fd 0
post-up echo 1 > /proc/sys/net/ipv4/ip_forward
# 3333-> 3389 de la VM en 192.168.2.10
post-up iptables -t nat -A PREROUTING -p tcp -i vmbr0 --dport 3333 -j DNAT --to-destination 192.168.2.10:3389
# annulation
#post-down iptables -t nat -D PREROUTING -p tcp -i vmbr0 --dport 3333 -j DNAT --to-destination 192.168.2.10:3389
# la VM peux sortir sur internet
#iptables -t nat -A POSTROUTING -s 192.168.2.10/32 -o vmbr0 -j SNAT --to-source xxx.xxx.xxx.xxx
Annulation
#iptables -t nat -D POSTROUTING -s 192.168.2.10/32 -o vmbr0 -j SNAT --to-source xxx.xxx.xxx.xxx
iptables -t nat -L -n -v
Category Archives: Uncategorized
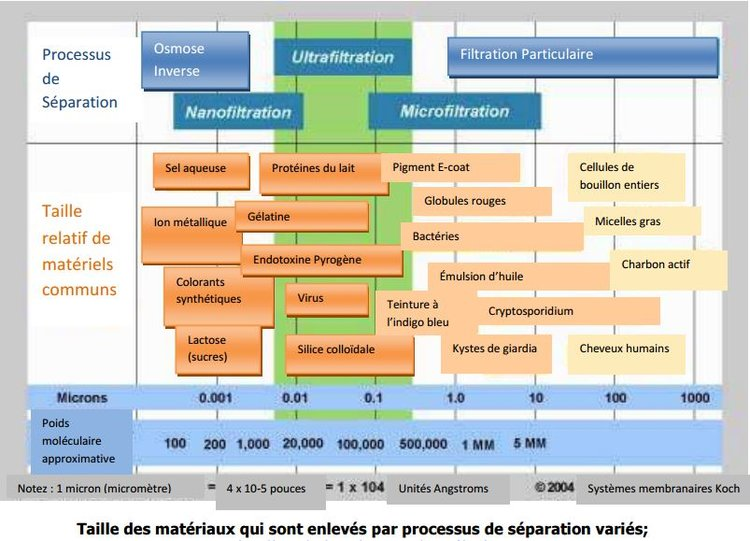
Type de filtre pour l’eau
| DN | Pouces | Gaz |
⌀ externe Plastique |
⌀ externe Acier |
| 6 | 1/8 | – | – | 10,3 |
| 8 | 1/4 | 8/13 | 12 | 13,7 |
| 10 | 3/8 | 12/17 | 16 | 17,1 |
| 15 | 1/2 | 15/21 | 20 | 21,3 |
| 20 | 3/4 | 20/27 | 25 | 26,7 |
| 25 | 1 | 26/32 | 32 | 33,4 |
| 32 | 1″ 1/4 | 33/42 | 40 | 42,2 |
| 40 | 1″ 1/2 | 40/49 | 50 | 48,3 |
| 50 | 2″ | 50/60 | 63 | 60,3 |
| 65 | 2″ 1/2 | 66/76 | 75 | 73 |
| 80 | 3 | 80/90 | 90 | 88,9 |
| – | 3″ 1/2 | 100 | – | 101,6 |
| 100 | 4 | 114 | 110/125 | 114,3 |
| 125 | 5 | – | 125/140 | 141,3 |
| 150 | 6 | – | 160/180 | 168,3 |
| 200 | 8 | – | 200/250 | 219,1 |
| 250 | 10 | – | 250/280 | 273 |
| 300 | 12 | – | 315 | 323,8 |
| 350 | 14 | – | 355 | 355,6 |
| 400 | 16 | – | 400 | 406,4 |
| 450 | 18 | – | 450/500 | 457 |
| 500 | 20 | – | 500/560 | 508 |
| – | 22 | – | – | 559 |
| 600 | 24 | – | 630 | 609,6 |
Raspberry Sense HAT test
apt-get update apt-get install sense-hat pip install pillow
#!/usr/bin/python
#arc en ciel arrêt CTLR/C
import time
from sense_hat import SenseHat
import signal
import os
import time
sense = SenseHat()
print('Mon PID est:', os.getpid())
def receiveSignal(signalNumber, frame):
print('Demande arret:', signalNumber)
sense.clear()
exit()
return
if __name__ == '__main__':
# register the signals to be caught
signal.signal(signal.SIGHUP, receiveSignal)
signal.signal(signal.SIGINT, receiveSignal)
signal.signal(signal.SIGQUIT, receiveSignal)
signal.signal(signal.SIGILL, receiveSignal)
signal.signal(signal.SIGTRAP, receiveSignal)
signal.signal(signal.SIGABRT, receiveSignal)
signal.signal(signal.SIGBUS, receiveSignal)
signal.signal(signal.SIGFPE, receiveSignal)
#signal.signal(signal.SIGKILL, receiveSignal)
signal.signal(signal.SIGUSR1, receiveSignal)
signal.signal(signal.SIGSEGV, receiveSignal)
signal.signal(signal.SIGUSR2, receiveSignal)
signal.signal(signal.SIGPIPE, receiveSignal)
signal.signal(signal.SIGALRM, receiveSignal)
signal.signal(signal.SIGTERM, receiveSignal)
sense.low_light = True
pixels = [
[255, 0, 0], [255, 0, 0], [255, 87, 0], [255, 196, 0], [205, 255, 0], [95, 255, 0], [0, 255, 13], [0, 255, 122],
[255, 0, 0], [255, 96, 0], [255, 205, 0], [196, 255, 0], [87, 255, 0], [0, 255, 22], [0, 255, 131], [0, 255, 240],
[255, 105, 0], [255, 214, 0], [187, 255, 0], [78, 255, 0], [0, 255, 30], [0, 255, 140], [0, 255, 248], [0, 152, 255],
[255, 223, 0], [178, 255, 0], [70, 255, 0], [0, 255, 40], [0, 255, 148], [0, 253, 255], [0, 144, 255], [0, 34, 255],
[170, 255, 0], [61, 255, 0], [0, 255, 48], [0, 255, 157], [0, 243, 255], [0, 134, 255], [0, 26, 255], [83, 0, 255],
[52, 255, 0], [0, 255, 57], [0, 255, 166], [0, 235, 255], [0, 126, 255], [0, 17, 255], [92, 0, 255], [201, 0, 255],
[0, 255, 66], [0, 255, 174], [0, 226, 255], [0, 117, 255], [0, 8, 255], [100, 0, 255], [210, 0, 255], [255, 0, 192],
[0, 255, 183], [0, 217, 255], [0, 109, 255], [0, 0, 255], [110, 0, 255], [218, 0, 255], [255, 0, 183], [255, 0, 74]
]
msleep = lambda x: time.sleep(x / 1000.0)
def next_colour(pix):
r = pix[0]
g = pix[1]
b = pix[2]
if (r == 255 and g < 255 and b == 0):
g += 1
if (g == 255 and r > 0 and b == 0):
r -= 1
if (g == 255 and b < 255 and r == 0):
b += 1
if (b == 255 and g > 0 and r == 0):
g -= 1
if (b == 255 and r < 255 and g == 0):
r += 1
if (r == 255 and b > 0 and g == 0):
b -= 1
pix[0] = r
pix[1] = g
pix[2] = b
while True:
for pix in pixels:
next_colour(pix)
sense.set_pixels(pixels)
msleep(0.5)
ESP8266 0.91 pouces OLED CP2014
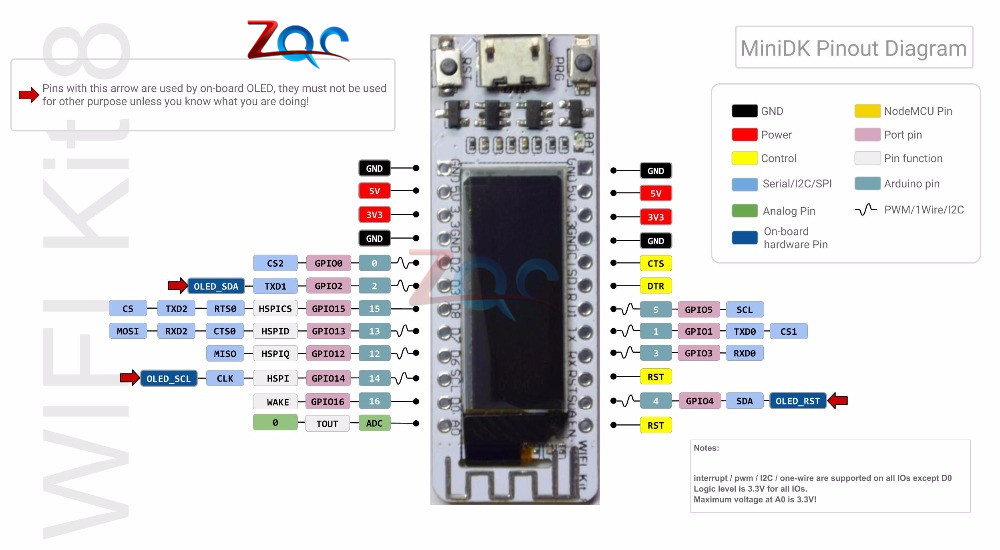
Puce WIFI 1*0.91 »ESP8266 0.91 pouces OLED CP2014 32 mo Flash ESP 8266 Module Internet des objets carte PCB NodeMcu pour Arduino IOT
https://www.arduino.cc/en/software Installer l’IDE toutes options dont pilotes
Fichiers->préférence->paramètres-> URL de gestionnaires de cartes… https://arduino.esp8266.com/stable/package_esp8266com_index.json
Croquis-> inclure bibliothèques-> gérer -> rechercher u8g2-> installer
Outils-> type de carte->gestionnaire de carte->ajouter NODEMCU
Outil -> type de carte ->NODEMCU 1.0 (ESP-12E Module)
Port com -> le nouveau quand on branche la carte
//exemple de code
#include <U8g2lib.h>
//U8g2 Contructor
U8G2_SSD1306_128X32_UNIVISION_F_HW_I2C u8g2(U8G2_R0, /* reset=*/ 16, /* clock=*/ 5, /* data=*/ 4);
// Alternative board version. Uncomment if above doesn't work.
// U8G2_SSD1306_128X32_UNIVISION_F_HW_I2C u8g2(U8G2_R0, /* reset=*/ 4, /* clock=*/ 14, /* data=*/ 2);
u8g2_uint_t offset; // current offset for the scrolling text
u8g2_uint_t width; // pixel width of the scrolling text (must be lesser than 128 unless U8G2_16BIT is defined
char *text = "MESSAGE DE TEST "; // scroll this text from right to left
int passage =0;
void setup(void) {
u8g2.begin();
u8g2.setFont(u8g2_font_logisoso32_tf); // set the target font to calculate the pixel width
width = u8g2.getUTF8Width(text); // calculate the pixel width of the text
u8g2.setFontMode(0); // enable transparent mode, which is faster
}
void loop(void) {
u8g2_uint_t x;
//text=text.concat(String(passage));
u8g2.firstPage();
do {
passage=passage+1;
// draw the scrolling text at current offset
x = offset;
u8g2.setFont(u8g2_font_logisoso32_tf); // set the target font
do { // repeated drawing of the scrolling text...
u8g2.drawUTF8(x, 32, text); // draw the scolling text
x += width; // add the pixel width of the scrolling text
} while ( x < u8g2.getDisplayWidth() ); // draw again until the complete display is filled
u8g2.setFont(u8g2_font_logisoso32_tf); // draw the current pixel width
u8g2.setCursor(0, 64);
u8g2.print(width); // this value must be lesser than 128 unless U8G2_16BIT is set
} while ( u8g2.nextPage() );
offset -= 1; // scroll by one pixel
if ( (u8g2_uint_t)offset < (u8g2_uint_t) - width )
offset = 0; // start over again
}
https://arduinogetstarted.com/tutorials/arduino-http-request
DEBIAN root password changer
avant démarrage « e » sur la ligne de Grub * Debian Linux
ajouter init=/bin/bash à la fin de la ligne linux…. ro quiet
ctrl + x
mount -n -o remount,rw / passwd ctrl + alt + supr
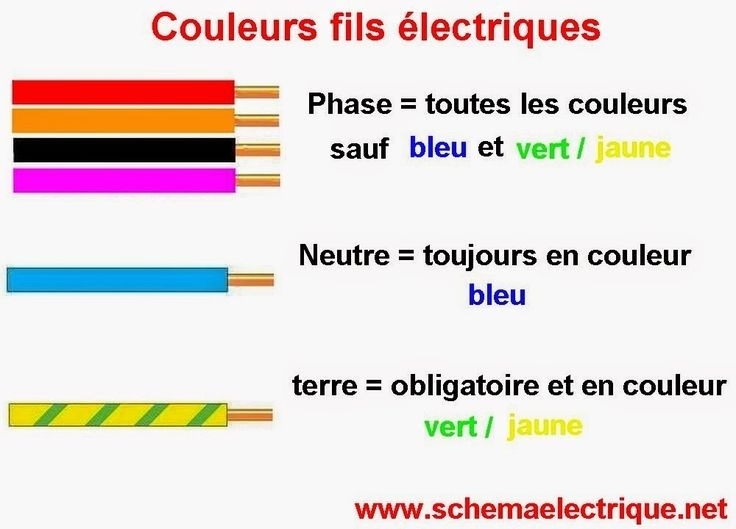
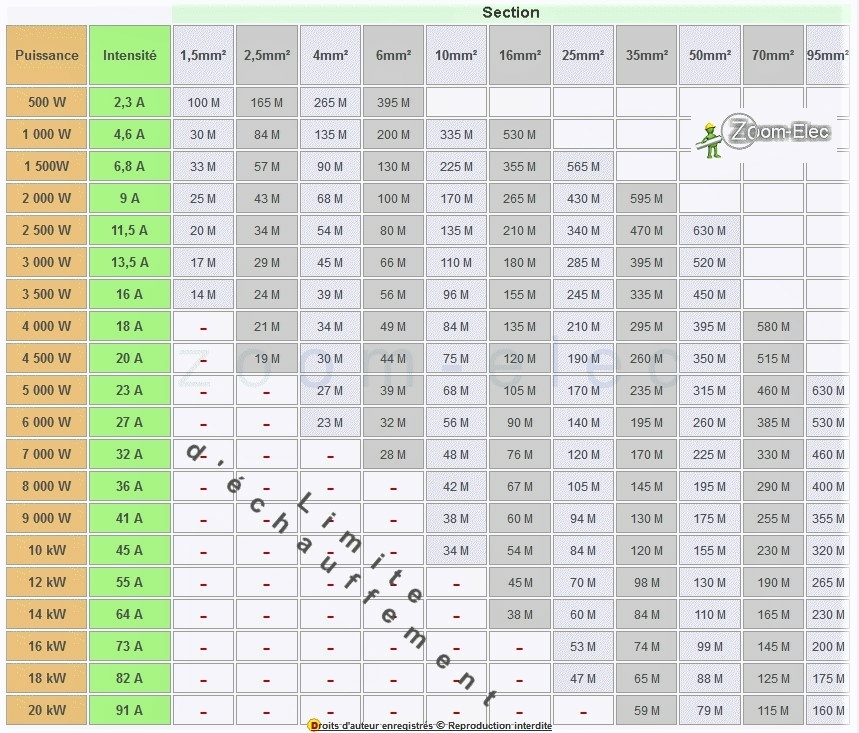
ELECTRICITE
Windows paramètres raccourci
- Créer un dossier n’importe où
- renommer en : GodMode.{ED7BA470-8E54-465E-825C-99712043E01C}
- entrée.
IP HOST
WIFI QRCODE
BASH rm trop de fichiers
#Exemple:
#Enlève, delete tous les csv du répertoire quand rm *.csv renvoi un message trop de fichiers
# Argument list too long
perl -e 'for(</home/morepertoire/*.csv>){unlink}'